My paper on model-based Reinforcement Learning (RL) using the Differentiable Neural Computer (DNC) was accepted at the Workshop on Multi-Task and Lifelong Reinforcement Learning at the 2019 International Conference on Machine Learning (ICML).
For this work I investigated the use of the DNC in the lifelong learning context. Lifelong learning differs from multi-task learning slightly. In multi-task learning, the goal is to learn multiple tasks simultaneously. In lifelong learning, the goal is to learn multiple tasks sequentially, without forgetting old tasks.
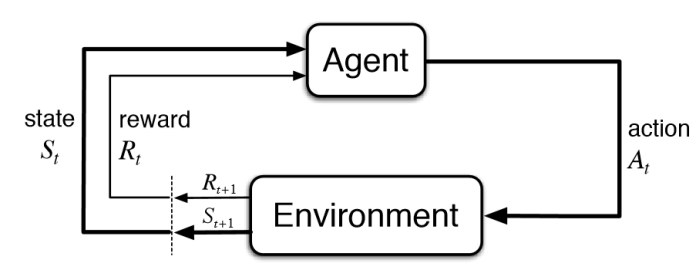
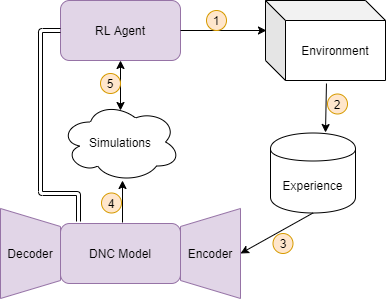
In the paper I introduced the Neural Computer Agent, where a model of the environment is learned by a DNC, and a paired agent is trained to maximize rewards using the Proximal Policy Optimization (PPO) algorithm in simulations generated by the DNC model.
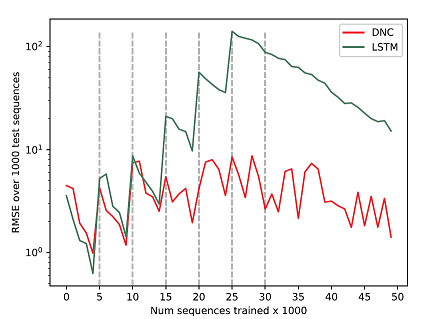
I hypothesized that the DNC can be used to learn a global model as opposed to task-specific local models which are used in multi-task and lifelong learning. I first tested the DNC on an integer addition task where the task progressively changed in difficulty, and found that the DNC can leverage past knowledge and adapt to new tasks quickly, outperforming LSTM by an order of magnitude. Additionally, the DNC continued to perform well on the prior learned integer addition tasks after it learned new ones.
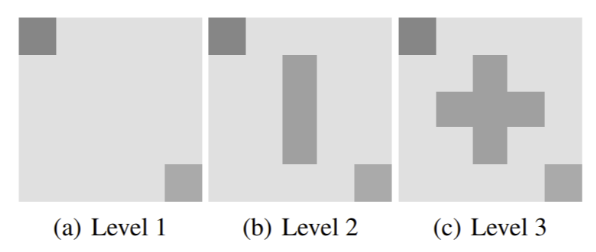
I tested The Neural Computer Agent on two toy RL environments that contained multiple tasks. I found that in both environments, the DNC was able to learn an adequate model of all tasks, and the Neural Computer Agent solved each environment iteratively entirely in simulations.
Link to full paper: https://arxiv.org/abs/1906.07248